- 1. Databricks Repos 利用時におけるエラー対応:Cannot perform git operation due to conflicting names
- 2. Python文法まとめ【四則演算と型】
- 3. Dockerでローカルに分析環境を整える方法
- 4. 広告施策の売上貢献度を機械学習で分析してみた(機械学習初学者)
- 5. Nuitkaで発生したUnicodeDecoderErrorについて
- 6. DjangoでTodoListを作った話
- 7. 深層学習環境設定
- 8. OMRON SENTECカメラ Python Buildup (8) singlefilter_opencv.py
- 9. OMRON SENTECカメラ Python Buildup (7) singleconverter_opencv.py
- 10. OMRON SENTECカメラ Python Buildup (6) grab_ip_opencv.py
- 11. OMRON SENTECカメラ Python Buildup (5) grab_callback_opencv.py
- 12. 【機械学習】決定木入門:直感的な理解と実装
- 13. OMRON SENTECカメラ Python Buildup (4) grab_opencv.py
- 14. OMRON SENTECカメラ Python Buildup (3) grab_callback_class.py
- 15. OMRON SENTECカメラ Python Buildup (2) grab_callback.py
- 16. PythonでGoogleフォトの特定のアルバムの画像をEagleにまとめてアップロードしてみた
- 17. OMRON SENTECカメラ Python Buildup (1) grab.py
- 18. OMRON SENTECカメラ Python Buildup
- 19. pandasで日付データをいじる、まとめ
- 20. 【個人開発】これまでになかったデート体験共有アプリ「マッチシェア」を開発した話
Databricks Repos 利用時におけるエラー対応:Cannot perform git operation due to conflicting names
## 概要
Databricks Repos 利用時にて、ブランチの切り替え、あるいは、 Repo の作成時に下記のエラーが発生した場合の対応方法を共有します。原因としては、Databricks ノートブック(`# Databricks notebook source`ではじまる python ファイル)と同名のフォルダを同一ディレクトリに配置できないことです。ファイル名を変更する対応が必要となります。
> Error checking out branch
Cannot perform git operation due to conflicting names: paths [‘test’, ‘test.py’] would all become ‘test’; A folder cannot contain a notebook with the same name as another notebook, file, or folder (excluding file extensions). Please change the name of one of your n
Python文法まとめ【四則演算と型】
# はじめに
Pythonの基礎的なことをまとめています。
Google Colabで実行できます。
[Colabの使い方(Python.jp)](https://www.python.jp/train/experience/colab.html “Python.jp 入門講座”)# 四則演算
Pythonで四則演算+aを計算したい場合、以下の記述を利用します。
~~~Python:サンプル
a = 7
b = 3print(a + b) # 足し算
print(a – b) # 引き算
print(a * b) # 掛け算
print(a / b) # 割り算
print(a % b) # 割り算のあまり
print(a ** b) # べき乗
~~~
~~~:実行結果
10
4
21
2.3333333333333335
1
343
~~~
# 型
Pythonで使われる代表的な型を以下に紹介します。
変数に代入する場合型の宣言は必要ありません。
型が違う場合、四則演算は組み合わせによってはエラーとなります。
~~~
int:整数型
~~~
前述の例が整数型の四則演算の結果
Dockerでローカルに分析環境を整える方法
# 1. 概要
このリポジトリは、DockerでJupyter Notebookを起動し、エディタをVScodeで使えるようにしたものです。https://github.com/ShotaArima/docker-jupyter
# 2. 対象者、メリット
**対象者**
>- 分析の書籍や研究などで、Pythonのライブラリ環境を設定したい人
>- Google Colabではなく、ローカルで実行したい人
>- ソースコードをgitで簡単に管理したい人**メリット**
>- ライブラリの設定を自分好みにカスタマイズすることができる
>- 書籍や研究のソースコードの再現する際の雛形として簡単に環境構築できる
>- ローカルに保存されてるgitや補完機能などをそのまま使用できる# 3. 構成
以下の図をご覧ください。

*アイコン提供元[^1]*
広告施策の売上貢献度を機械学習で分析してみた(機械学習初学者)
## はじめに
はじめまして。
インフラおよび業務アプリ系のエンジニアを経験した後、広告代理店に転職し、今は専らデータ分析基盤の構築と運用(主にBigQuery+Looker)をやっています。40歳を過ぎて自身のスキルレベルに危機感を感じて、独学ではなく体系的に学べる講座を受けようと思いAidemyのデータ分析講座を受講しました。
[Aidemyデータ分析講座](https://aidemy.net/grit/premium/lp-analysis/)働きながらだったので平日残業学習に割ける時間がなかなか取れないと思い6ヵ月コースを受講しました。
## 学んだこと
機械学習で活用するPythonの初級~中級までの知識や機械学習の概論から、教師あり/なし学習、ディープラーニングのモデル構築や評価方法などを体系的に学ぶことができました。
これまで、Pythonはインターネット上のサンプルコードを参考にさせていただくことがほとんどでしたが、基本文法から応用的な記法を学べることで基礎力UPになったと感じています。
また機械学習についても、具体的にどういう手順でデータを準備して、機
Nuitkaで発生したUnicodeDecoderErrorについて
## エラー内容

– エラー文
UnicodeDecodeError: ‘cp932’ codec can’t decode byte 0x85 in position 5052759: illegal multibyte sequence
Nuitka-Reports: Compilation crash report written to file ‘nuitka-crash-report.xml’. Please include it in your bug report.
– 日本語訳
ユニコードでコードエラー: ‘cp932’ コーデックが位置 5052759 のバイト 0x85 をデコードできません: 不正なマルチバイト列
Nuitka-Reports: コンパイルのクラッシュレポートが ‘nuitka-crash-
DjangoでTodoListを作った話
# 作ったきっかけ
djangoでのwebアプリ開発をしたかったので、簡単に作れそうなtodolistwebアプリケーションを作りました。:::note warn
この記事は開発日記のようなものなのでかなり乱雑です、参考になる部分は少ないと思います
:::
## ファイル構成“`
.
├── README.md
├── containers
│ ├── django
│ │ └── Dockerfile
│ └── postgres
│ └── Dockerfile
├── docker-compose.yml
├── requirements.txt
└── todolist
├── accounts
│ ├── __init__.py
│ ├── admin.py
│ ├── apps.py
│ ├── migrations
│ │ └── __init__.py
│ ├── models.py
│ ├── templates
│ │
深層学習環境設定
# 深層学習を実行できる環境を作成する
### Linux
とりあえずGPUを使うにはLinuxのほうがいいらしいので.Windows11にLinuxをいれます.WSL2が簡単に導入できてとてもいい時代ですね.ubuntuを入れようと思ってたけどkaliもインストール可能なのが嬉しい.
なおセットアップ時にwslのアップデートで引っかかったので次回以降は気を付けていきたい.
### python
Linuxにpythonを入れていく.将来を見据えてpyenvを活用したい.
OMRON SENTECカメラ Python Buildup (8) singlefilter_opencv.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
## StApi Python
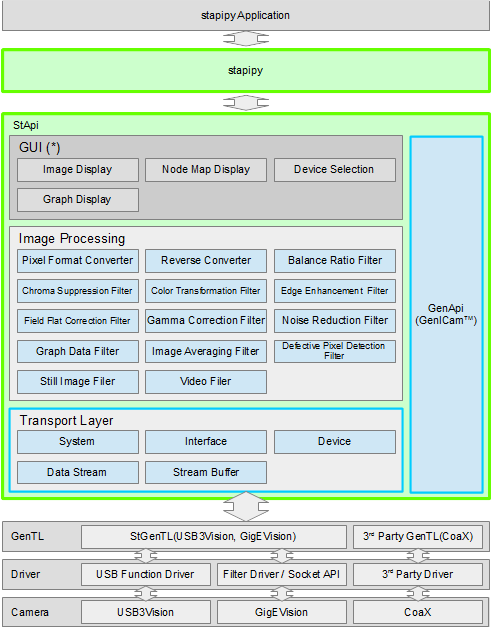
StApi Python(stapipy)は、Pythonプログラミング言語でStApiのTransport Layer(StApi TL)と画像処理(StApi IP)を使用できるようにします。
今回のコードは、Image Processingの中のEdge Enhancement FilterをHW機能を利用する内容になります。次の図は、このパッケージとStApiの関係を示しています。
### コードの全体説明
このコードは、カメラから取得した画像データに対してエッジ強調フィルターを適用し、その後StApiのコンバーターを使用してピクセルフォーマットを変換し、
OMRON SENTECカメラ Python Buildup (7) singleconverter_opencv.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### コードの全体説明
このコードは、カメラから取得した画像データをStApiのコンバーターを使用して処理し、その後OpenCVを使用して表示するサンプルです。主な機能は以下の通りです:
1. StApiの初期化
2. カメラへの接続
3. 画像データの取得
4. StApiコンバーターを使用した画像処理(Y軸反転およびピクセルフォーマットのBGR8への変換)
5. OpenCVを使った画像のプレビュー### コードの詳細分析
#### インポートと設定
“`python
import cv2
import numpy as np
import stapipy as st# 取得する画像の枚数
number_of_images_to_grab = 100# OpenCVを使用して表示する際の画像スケール
DISPLAY_RESIZE_FACTOR = 0.3
“`– `cv2`: OpenCVライブラリをインポー
OMRON SENTECカメラ Python Buildup (6) grab_ip_opencv.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### コードの全体説明
このコードは、StApiを使用してカメラから画像データを取得し、そのデータをOpenCVを使って表示するサンプルです。主な機能は以下の通りです:
1. StApiの初期化
2. カメラへの接続
3. 画像データの取得
4. StApi IPを使用したBayer画像形式のBGR8への変換
5. OpenCVを使った画像のプレビュー### コードの詳細分析
#### インポートと設定
“`python
import cv2
import numpy as np
import stapipy as st# 取得する画像の枚数
number_of_images_to_grab = 1000# OpenCVを使用して表示する際の画像スケール
DISPLAY_RESIZE_FACTOR = 0.3
“`– `cv2`: OpenCVライブラリをインポートします。
– `numpy`: 画像データの処理
OMRON SENTECカメラ Python Buildup (5) grab_callback_opencv.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### コードの全体説明
このコードは、カメラから取得した画像データをOpenCVを使って表示するサンプルです。主な機能は以下の通りです:
1. StApiの初期化
2. カメラへの接続
3. コールバック関数を用いた画像データの取得
4. 取得した画像データをOpenCVで処理し表示### クラス `CMyCallback` の定義とメソッド
“`python
class CMyCallback:
“””
Class that contains a callback function.
“””def __init__(self):
self._image = None
self._lock = threading.Lock()@property
def image(self):
duplicate = None
【機械学習】決定木入門:直感的な理解と実装
## 目次
1. [はじめに](#1-はじめに)
2. [決定木とは](#2-決定木とは)
– [基本概念](#決定木の基本概念)
– [構造](#決定木の構造)
3. [決定木の構築方法](#3-決定木の構築方法)
– [データの純度と分割基準](#データの純度と分割基準)
– [エントロピーとは](#エントロピーとは)
– [分割の例](#分割の例)
– [構築アルゴリズム](#決定木の構築アルゴリズム)
4. [Pythonでの決定木の実装](#4-pythonでの決定木の実装)
– [必要なライブラリのインストール](#必要なライブラリのインストール)
– [サンプルデータの準備と決定木の構築](#サンプルデータの準備と決定木の構築)
– [モデルの可視化](#モデルの可視化)
5. [決定木の利点と欠点](#5-決定木の利点と欠点)
– [利点](#利点)
– [欠点](#欠点)
6. [まとめ](#6-まとめ)## 1. はじめに
こんにちは!ご覧いただきありがとうございます。
OMRON SENTECカメラ Python Buildup (4) grab_opencv.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### コード全体の説明
このコードは、カメラから取得した画像データをOpenCVを使って処理し、表示するサンプルです。具体的には、以下の手順を実行します:
1. StApiの初期化
2. カメラへの接続
3. 画像データの取得
4. 画像データをOpenCV形式に変換
5. Bayer画像形式をRGBに変換
6. OpenCVで画像をプレビュー### コードの詳細分析
#### インポートと設定
“`python
import cv2
import numpy as np
import stapipy as st# Number of images to grab
number_of_images_to_grab = 100# Image scale when displaying using OpenCV.
DISPLAY_RESIZE_FACTOR = 0.3
“`– `cv2`: OpenCVライブラリをイ
OMRON SENTECカメラ Python Buildup (3) grab_callback_class.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### コードの全体説明
このコードは、カメラから画像データを取得するためのコールバック関数をクラス内に定義し、そのクラスを使用して画像データを取得する方法を示しています。具体的には以下の手順を実行します:
1. StApiの初期化
2. カメラへの接続
3. コールバッククラスの登録と使用
4. コールバック関数を通じた画像データの取得### クラス `CMyCallback` の定義
“`python
class CMyCallback:
“””
Class that contains a callback function.
“””def datastream_callback(self, handle=None, context=None):
“””
Callback to handle events from DataStream.:
OMRON SENTECカメラ Python Buildup (2) grab_callback.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### コード全体の説明
このコードは、カメラからの画像データを取得するためのコールバック関数を使用する方法を示すサンプルです。具体的には、以下の手順を実行します:
1. StApiの初期化
2. カメラへの接続
3. コールバック関数の登録と使用
4. コールバック関数を通じた画像データの取得### コード
“`python
“””
This sample shows how to use callback function to acquire image data from camera.
The following points will be demonstrated in this sample code:
– Initialize StApi
– Connect to camera
– Register and use callback function with StApi
– Acquire imag
PythonでGoogleフォトの特定のアルバムの画像をEagleにまとめてアップロードしてみた
ここ最近、[Eagle](https://jp.eagle.cool/) を使用して画像・ナレッジ管理すると便利だと聞き、試したところ噂通り便利だったため一括で移行を進めることにしました。
普段、画像はとりあえずGoogleフォトに保管していたので、まとめて欲しいものだけEagleにアップロードしたいと思ったときに今回の方法を実施しました。
# Eagleとは
Eagleとは、台湾のogdesign.incという会社が開発したクリエイター向けの画像管理ツールです。
筆者はクリエイターではなくエンジニアですが、
– 管理できるものがPNGやJPEGなどの画像ファイルに留まらずPDF、ウェブページ、GIFなど多岐に渡る
– ローカルで動作しますが、Googleドライブなどのクラウドストレージの紐づけられる
– Chrome拡張機能が提供されているためブラウザの画像を直接Eagleに保存できる
– Eagle APIを使用してAPIベースで操作も可能な点に惹かれました。
# 事前準備
事前準備として以下を実施します。
– Python実行環境の用意
– Eagle API
OMRON SENTECカメラ Python Buildup (1) grab.py
こちらの資料を読んでください。
https://qiita.com/kotai2003/items/19d840553fc6d69ec17d
### 基本的なカメラ操作と画像取得の方法 – StApiを使って
この記事では、StApiを使用してカメラに接続し、画像データを取得する基本的な方法を紹介します。以下のコードは、カメラから画像データを取得し、情報を表示する基本的な操作を示しています。
#### コードの概要
このサンプルコードでは、次のポイントを示します:
– StApiの初期化
– カメラへの接続
– メインスレッドでの画像データの取得“`python
import stapipy as st# Number of images to grab
number_of_images_to_grab = 100try:
# Initialize StApi before using.
st.initialize()# Create a system object for device scan and connection.
OMRON SENTECカメラ Python Buildup
## はじめに
OMRON SETNECカメラのStAPiとOpenCVを利用した制御の進め方を説明します。
OMRON SENTEC社のSDKで提供されたサンプルコードの解説記事です。
以下のリストは、高速で効率的な画像取得プログラムを学習するために、初心者が読むべきコードの順番と各コードの説明を整理したものです。
### コードの説明と読む順番
1. **grab.py**
– **説明**: 基本的な画像取得操作を学びます。StApiの初期化、カメラ接続、画像取得、データストリームの基本的な使い方を習得します。
– **読む順番**: 1
– 説明:https://qiita.com/kotai2003/items/a20f4ee0ba978e54808e2. **grab_cal
pandasで日付データをいじる、まとめ
# 内容
筆者は記憶力がかなり低めで、日付型を処理する方法がうろ覚えなせいでよく調べ直してるので、まとめて忘れないようにしておきたい。
データが文字列、数値、unixだったときについて書いていきます。# この記事で使うサンプルデータ
“`python
import pandas as pd
from datetime import datedata = {‘name’: [‘田中’, ‘鈴木’, ‘佐藤’, ‘高橋’],
‘birthday_str’: [‘19900512’, ‘19851225’, ‘20000315’, ‘19970708’],
‘birthday_int’: [19900512, 19851225, 20000315, 19970708],
‘hiredate’: [date(2015, 4, 1), date(2010, 10, 15), date(2022, 2, 28), date(2018, 6, 1)],
‘hiredate_unix’: [1427862000, 1287107
【個人開発】これまでになかったデート体験共有アプリ「マッチシェア」を開発した話
## はじめに
こんにちは、[@natsuya_IT](https://x.com/natsuya_IT)と申します。最近、デート体験を共有するアプリ **「マッチシェア」** を開発しました。
https://matching-share-introduction.vercel.app/

マッチシェアはマッチングアプリで出会った人とのデート体験を共有するアプリです。
## 開発に至った経緯
### 課題
僕たちは、数多くのマッチングアプリが存在する中で**マッチングアプリを使用しているユーザーが実際にどんな出会いやデートをしているかまではを知ることができない**という課題に着目しました。
一般的なマッチングアプリでは、マッチングが成立した後のコミュニケーションや実際のデートの様子はユ